I2R Lab, Clemson University
科研经历 Research
会议及期刊论文 Conference & Journal Papers
Passivity and Stability Analysis of Human-Robot Co-Manipulation Switched System
Zhanrui Liao, and Yue Wang
In preparation for IEEE Control Systems Letters (L-CSS)
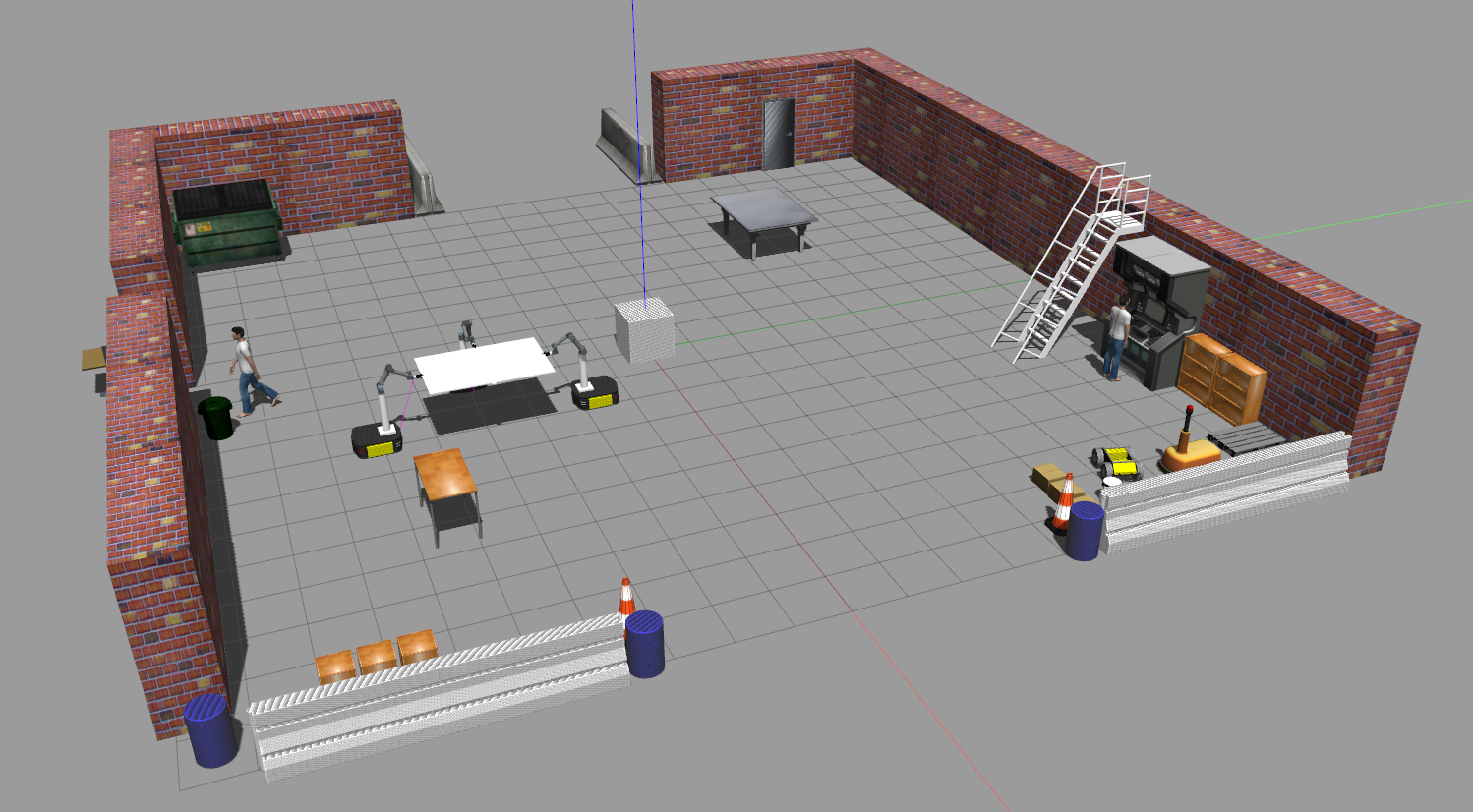
开发基于无缘性的优先级多任务的机械臂控制算法 Developing passivity-based hierarchical task priority control algorithms for mobile manipulators


Trust-Based Variable Impedance Control of Human-Robot Cooperative Manipulation
Zhanrui Liao, and Yue Wang
Robotics and Computer-Integrated Manufacturing (RCM), 2024


Human Trust in Robots: A Survey on Trust Models and Their Controls/Robotics Applications
Yue Wang, Fangjian Li, Huanfei Zheng, Longsheng Jiang, Maziar Fooladi Mahani, and Zhanrui Liao
IEEE Open Journal of Control Systems (OJ-CSYS), 2023


Passivity Analysis of Nonlinear Impulsive Multi-Dimensional Switched Systems
Zhanrui Liao, and Yue Wang
American Control Conference (ACC). IEEE, 2021

Trust-based multi-robot symbolic motion planning with human-in-the-loop
Yue Wang, Laura R. Humphrey, Zhanrui Liao, and Huanfei Zheng
ACM Transactions on Interactive Intelligent Systems (TiiS), 2018



Trust-Based Impedance Control Strategy for Human-Robot Cooperative Manipulation
Sadrfaridpour Behzad, Maziar Fooladi Mahani, Zhanrui Liao, and Yue Wang
Dynamic Systems and Control Conference, ASME, 2018


Human-robot trust integrated task allocation and symbolic motion planning for heterogeneous multi-robot systems
Huanfei Zheng, Zhanrui Liao, and Yue Wang
Dynamic Systems and Control Conference, ASME, 2018


A Quantitative Measure of Regret in Decision-Making for Human-Robot Collaborative Search Tasks
Zhanrui Liao, Longsheng Jiang, and Yue Wang
American Control Conference (ACC), IEEE, 2017
Student Travel Awards
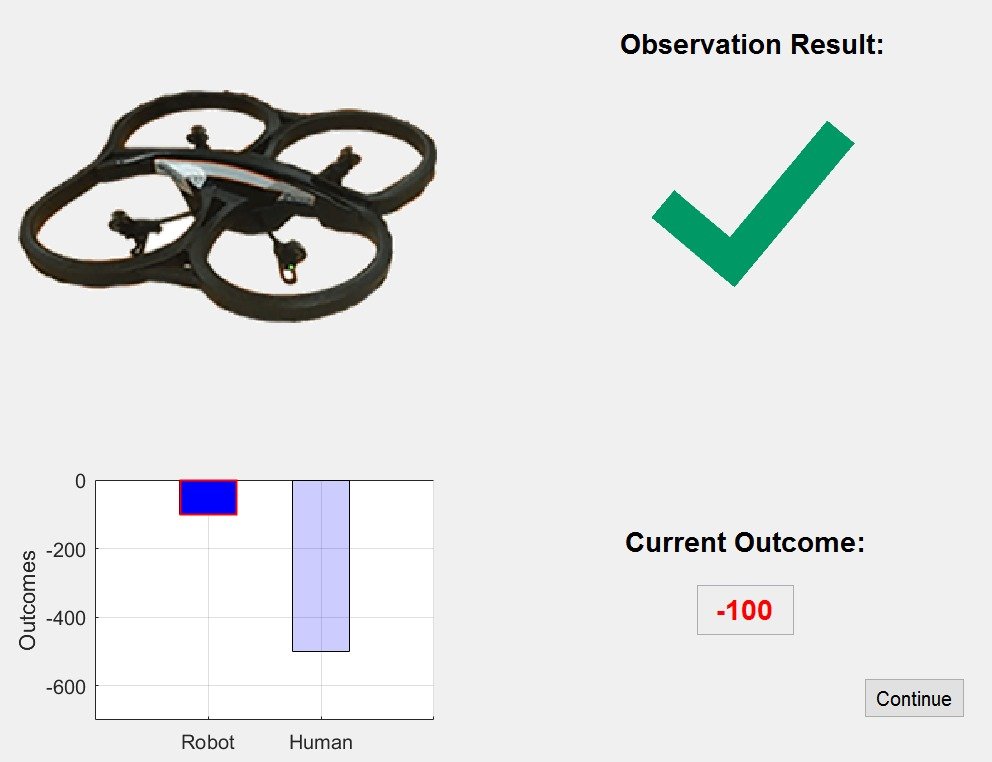

Regret-Based Allocation of Autonomy in Shared Visual Detection for Human–Robot Collaborative Assembly in Manufacturing
SM Mizanoor Rahman, Zhanrui Liao, Longsheng Jiang, and Yue Wang
Trends in Control and Decision-Making for Human–Robot Collaboration Systems, 2017
A Regret-based Autonomy Allocation Scheme for Human-robot Shared Vision Systems in Collaborative Assembly in Manufacturing
SM Mizanoor Rahman, Zhanrui Liao, Longsheng Jiang, and Yue Wang
IEEE International Conference on Automation Science and Engineering (CASE), 2016
